康耐视机器视觉取代传统火焰处理机器人
在Fitz-Thors Engineering Inc.公司向一家一级汽车供应商提供的设计中,配备机器视觉的机器人取代了4台传统机器人。该机器人能够连续工作,从而消除了机器人在传统工作间工作时经常出现的闲置时间。同时,新的机器人方案无需接近传感器,使其能够处理更广泛的元件。
一台配备机器视觉的机器人,配合精心设计布局的工作间,能取代4台一般功能的机器人,从而极大地提高资产利用率。例如,汽车内饰件所用的不含挥发性有机化合物(VOC)涂层系统需要进行火焰处理,以增加表面张力,改善涂层的粘合性。用于进行火焰处理的工作间拥有4个工作站,传统的方案是每个工作站分配一台机器人,负责将需要进行火焰处理的元件安装在一个转盘夹具上,这些夹具均配备接近传感器。Fitz-Thors Engineering Inc.公司最近设计了一种新型工作间方案,极大地改进了这种传统方法,能够让一台机器人同时为4个工作站服务,并提供相同的生产量。
传统的火焰处理方法
汽车内饰件中使用的大多数塑料元件均需要进行涂层处理,以改进它们的手感和声学性能。最近出台的法规规定必须使用基于聚氨酯的不含VOC涂层系统或紫外线涂层,这些涂层要求基底具有较高水平的表面张力。火焰处理是一种成本低廉而高效的方式,可提供较高水平的表面张力,并帮助促进涂层的粘合力,消除底漆的需求。在汽车行业,为确保较高的质量水平,火焰处理通常采用机器人来完成。典型的车辆内饰件可能包含方向盘、仪表盘、控制台、手套箱等多个需要进行火焰处理的部件,对这些部件进行火焰处理的传统工作间通常由不同的工作站组成,每个工作站由一台单独的机器人服务。每个不同的元件均有一个定制夹具,并配备接近传感器,以确保元件固定在该夹具的正确位置。每个夹具安装在转盘上,以将操作员与机器人隔离开。操作员需加载每个元件,然后旋转该转盘,将元件放置到夹具上,并固定到位,以便机器人进行火焰处理。
机器视觉机器人应用的工作流程及效率
Fitz-Thors重新审视火焰处理系统。他们质疑为什么每个工作站均需要一台机器人,而这些机器人大部分时间都是闲置的。他们还探寻,在确保元件被放置到正确的位置方面,机器视觉是否是比接近传感器更好地解决方案。最后,Fitz-Thors得出结论,一台机器人配备视觉系统之后,能够在工作间周围快速移动到每个已准备好进行火焰处理的夹具位置,验证正确的元件是否存在,且是否放置在夹具的正确位置,然后对夹具上的元件进行火焰处理,接着移动到下一个夹具位置。
在新的设计中,在进行火焰处理之前,视觉系统将会检验元件,以检测元件是否存在,并将其固定在夹具的正确位置。配备视觉系统的机器人能够连续工作,消除了传统工作间工作经常出现的大量闲置时间。同时,新的机器人方案无需接近传感器,能够处理更广泛的元件,且节省了传感器连接所需的时间。在满负荷生产模式下运行时,与传统工作间相同,新的工作间一共需要4名操作员。然而,在非满负荷生产模式下运行时,新工作间只需2名操作员服务,每名操作员负责两个工作间的加载工作。
Fitz-Thors选择了一套入门级视觉系统,该系统是专门为一些特定的检验任务而开发的,比如,当视觉传感器的功能有限,而标准视觉系统又可能不具有成本效益时,即可采用这种系统。他们通过一个软件用户界面对该视觉系统进行了配置,选择了具有角度方向限制的图案定位视觉工具,其提供百分比匹配功能,以确保正确的元件放置在夹具的正确位置。该图案定位工具能够定位视场中任何位置的元件,因此,该程序能够始终检测到元件是存在或缺失,甚至在夹具处于不同位置的情况下也能够完成检查。
这种独立的视觉系统包含自对焦光学元件,并在IP67级工业外壳内集成有光源。通过自对焦功能,用户能够设置并保存与每个元件检验的相关的焦距值。同时,用户还能够通过互动软件手动微调焦距值,从而实现无缝式元件转换,无需对镜头进行任何手动调节。集成式白色光源适合大部分视觉应用。如果需要一种特定的彩色光源来照亮特殊元件或者特征,该视觉系统还可提供4种可选的彩色光源。
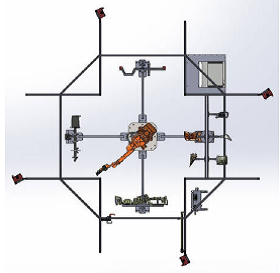
一台配备表面处理机的机器人负责对元件进行火焰处理。所有工艺电缆和软管均铺设在机械臂内部,以减少因干扰和磨损而引起的停机时间。集成式整理操作也确保机器人始终能够达到最大加速度,而不受任何限制。该机器人的摆动基圆半径仅为337mm,基底宽度仅为511mm。进行表面处理时,机器人点燃可燃气体,形成强烈的蓝色火焰和等离子场。火焰将改变元件表面上电子的分布和密度,并通过氧化使表面分子极化。同时,火焰处理还会使表面沉积一些其他化学功能基团,可促进润湿性和粘附性。
机器视觉用于汽车供应商工作间
Fitz-Thors公司将带有机器视觉的机器人应用在某家一级大型汽车供应商的火焰处理工作间。该系统由4个工作站组成,采用一个转盘处理较小的元件,同时,其他3个工作站用于处理仪表盘等较大的元件。机器人安全选项使操作员能够安全地将元件加载到3个无转盘的工作站;传感器用于监视操作员的位置。机器人安全选项实施几何和速度限制,确保其与操作员保持安全距离。同时,还根据操作员的位置持续计算一个安全工具区域,以限制机器人的移动,确保其保持在所定义的安全区域内。操作员负责加载转盘,或者将元件加载到一个空置的夹具上,并按下绿色按钮。机器人控制装置会根据夹具上元件的可用性和操作员的位置控制机器人。当机器人在不同的位置工作时,操作员可以走进工作间,并放置元件。
机器视觉用于测试台
Fitz-Thors公司在许多其他应用中也采用了机器视觉。例如,该公司最近为某家一级汽车供应商完成了一项自定义的自动化视觉应用。这些测试台采用视觉系统和显示屏来验证车门内侧上螺钉和塑料夹的位置和色彩。加工夹具确保操作员将车门固定到正确的位置,当车门固定到位后,操作员即可启动测试。显示屏将会在未通过象限的周围显示一个红色方框,以及在错误或缺失固件周围显示一个红色圆圈,警告操作员该元件未通过测试。这种视觉指示使操作员能够快速识别元件为什么没有通过测试。测试结果将保存在数据库中,以便在未来发现任何缺陷时,提供可追溯性。
截至目前,火焰处理工作间已成功运行一年多的时间。最近,Fitz-Thors公司为该汽车供应商开发了第二套系统。这个新的工作间能够作为现有工作间的备用工作间,同时也使新部件处理和生产量提高成为了可能。